- -30%



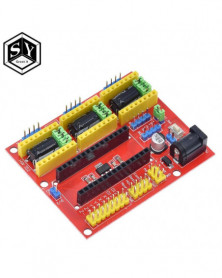

Color: escudo v3 - Gran calidad, nuevo CNC Shield V4 shield v3, máquina de grabado/impresora 3D/controlador A4988, placa de
Color: escudo v3 - Gran calidad, nuevo CNC Shield V4 shield v3, máquina de grabado/impresora 3D/controlador A4988, placa de
$ 2,68
30% de descuento
$ 3,83
Sin impuestos
Descripción:
Color: colorido
Material: resina metal
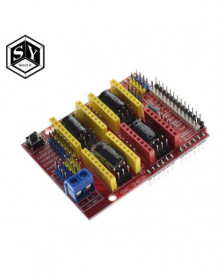
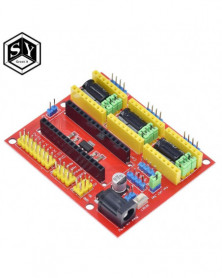
Tamaño de la placa de expansión: largo 7,2 CM, ancho 5,9 CM, alto 1,2 CM
Lista de embalaje:
Placa de expansión de la máquina de grabado CNC shield v4 * 1 Uds.
II.UNOY móduloIOCorrespondencia entre el puerto de Introducción
Las necesidades básicas del control del motor paso a paso, otros pines están en la máquina de grabado, o3DCuando se utilizó la impresora, aquí no hacemos detalles,IOCorresponde con la figura anterior.
Expansión tabla UNO ----------------------
8 ------------------------ EN (activación de la unidad del motor paso a paso, bajo activo)
7Z.DIR (control de dirección del eje Z)
6----------------------- Y.DIR (control de dirección del eje Y)
5----------------------- X.DIR (control de dirección del eje X)
4 ---------------------- Z.STEP (control paso a paso del eje Z)
3 ---------------------- Y.STEP (control paso a paso del eje Y)
2 ---------------------- X.STEP (control paso a paso del eje X)
/Aquí hay un simple procedimiento de control de motor paso a paso,
# Definir EN 8 // activación del motor paso a paso, bajo activo
# Defina X_DIR 5 // control de dirección del motor paso a paso del eje X
# Defina Y_DIR 6 // control de dirección del motor paso a paso del eje y
# Defina Z_DIR 7 // control de dirección del motor paso a paso del eje z
# Definir X_STP 2 // control paso a paso del eje x
# Definir Y_STP 3 // control paso a paso del eje y
# Definir Z_STP 4 // control paso a paso del eje z
/*
// Función: Función de paso: para controlar la dirección del motor paso a paso, el número de pasos.
Parámetros: control de dirección dir, dirPin correspondiente al motor, pasador paso a paso stepper pin correspondiente al motor paso a paso, escalando algunos pasos
// Sin valor de devolución
*/
Paso vacío (boolean dir, dirPin byte, byte stepperPin, int steps).
{
DigitalWrite (dirPin, dir);
Retraso (50);
Para (int i = 0; i
DigitalWrite (stepperPin, HIGH);
Delaymicrosegundos (800);
DigitalWrite (stepperPin, bajo);
Delaymicrosegundos (800);
}
}
Configuración nula () {/el motor paso a paso utilizado en el pin IO está configurado para salida.
PinMode (X_DIR, salida); pinMode (X_STP, salida);
PinMode (Y_DIR, salida); pinMode (Y_STP, salida);
PinMode (Z_DIR, salida); pinMode (Z_STP, salida);
PinMode (EN, salida);
DigitalWrite (EN, bajo);
}
Void loop () {
Paso (falso, X_DIR, X_STP, 200); // regazo de inversión del motor del eje X, 200 pasos para el Círculo
Paso (falso, Y_DIR, Y_STP, 200); // regazo de inversión del motor del eje y, 200 pasos para el Círculo
Paso (falso, Z_DIR, Z_STP, 200); // regazo de inversión del motor del eje z, 200 pasos para el Círculo
Retraso (1000);
Paso (true, X_DIR, X_STP, 200); // el motor del eje X se transfiere a la vuelta, 200 pasos al Círculo
Paso (true, Y_DIR, Y_STP, 200); // el motor del eje y se transfiere a la vuelta, 200 pasos al Círculo
Paso (true, Z_DIR, Z_STP, 200); // el motor del eje z se transfiere a la vuelta, 200 pasos al Círculo
Retraso (1000);
82318
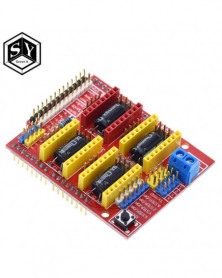
Placa de expansión
Color: colorido
Material: resina metal
Tamaño de la placa de expansión: largo 7,2 CM, ancho 5,9 CM, alto 1,2 CM
Lista de embalaje:
Placa de expansión de la máquina de grabado CNC shield v4 * 1 Uds.
II.UNOY móduloIOCorrespondencia entre el puerto de Introducción
Las necesidades básicas del control del motor paso a paso, otros pines están en la máquina de grabado, o3DCuando se utilizó la impresora, aquí no hacemos detalles,IOCorresponde con la figura anterior.
Expansión tabla UNO ----------------------
8 ------------------------ EN (activación de la unidad del motor paso a paso, bajo activo)
7Z.DIR (control de dirección del eje Z)
6----------------------- Y.DIR (control de dirección del eje Y)
5----------------------- X.DIR (control de dirección del eje X)
4 ---------------------- Z.STEP (control paso a paso del eje Z)
3 ---------------------- Y.STEP (control paso a paso del eje Y)
2 ---------------------- X.STEP (control paso a paso del eje X)
/Aquí hay un simple procedimiento de control de motor paso a paso,
# Definir EN 8 // activación del motor paso a paso, bajo activo
# Defina X_DIR 5 // control de dirección del motor paso a paso del eje X
# Defina Y_DIR 6 // control de dirección del motor paso a paso del eje y
# Defina Z_DIR 7 // control de dirección del motor paso a paso del eje z
# Definir X_STP 2 // control paso a paso del eje x
# Definir Y_STP 3 // control paso a paso del eje y
# Definir Z_STP 4 // control paso a paso del eje z
/*
// Función: Función de paso: para controlar la dirección del motor paso a paso, el número de pasos.
Parámetros: control de dirección dir, dirPin correspondiente al motor, pasador paso a paso stepper pin correspondiente al motor paso a paso, escalando algunos pasos
// Sin valor de devolución
*/
Paso vacío (boolean dir, dirPin byte, byte stepperPin, int steps).
{
DigitalWrite (dirPin, dir);
Retraso (50);
Para (int i = 0; i
DigitalWrite (stepperPin, HIGH);
Delaymicrosegundos (800);
DigitalWrite (stepperPin, bajo);
Delaymicrosegundos (800);
}
}
Configuración nula () {/el motor paso a paso utilizado en el pin IO está configurado para salida.
PinMode (X_DIR, salida); pinMode (X_STP, salida);
PinMode (Y_DIR, salida); pinMode (Y_STP, salida);
PinMode (Z_DIR, salida); pinMode (Z_STP, salida);
PinMode (EN, salida);
DigitalWrite (EN, bajo);
}
Void loop () {
Paso (falso, X_DIR, X_STP, 200); // regazo de inversión del motor del eje X, 200 pasos para el Círculo
Paso (falso, Y_DIR, Y_STP, 200); // regazo de inversión del motor del eje y, 200 pasos para el Círculo
Paso (falso, Z_DIR, Z_STP, 200); // regazo de inversión del motor del eje z, 200 pasos para el Círculo
Retraso (1000);
Paso (true, X_DIR, X_STP, 200); // el motor del eje X se transfiere a la vuelta, 200 pasos al Círculo
Paso (true, Y_DIR, Y_STP, 200); // el motor del eje y se transfiere a la vuelta, 200 pasos al Círculo
Paso (true, Z_DIR, Z_STP, 200); // el motor del eje z se transfiere a la vuelta, 200 pasos al Círculo
Retraso (1000);
82318
Placa de expansión

Política de seguridad

Política de entrega

Política de devolución